Technique SDR 11
Onzième Partie
Technique SDR 11
J’ai écrit cette suite d’articles dans un but pédagogique afin d’aider tous ceux qui, comme moi, souhaitaient découvrir, en les pratiquant, les techniques de réception SDR. Les spécialistes du domaine trouveront sans doute quelques approximations et erreurs dans mes explications. J’espère qu’ils ne m’en voudront pas et qu’ils me contacteront pour que nous les rectifions ensemble par la suite. Je parle aussi, ici ou là, de difficultés ou de bugs, si certains les ont surmontés, qu’ils me contactent pour que nous mettions à jour ce document. S’ils ont aussi parfois de meilleures solutions d’installation ou d’utilisation, qu’ils n’hésitent pas à me l’écrire.
CONTACTEZ-MOI à l’adresse : f80543@gmail.com
Contenus de l'article
Quoi décoder ?
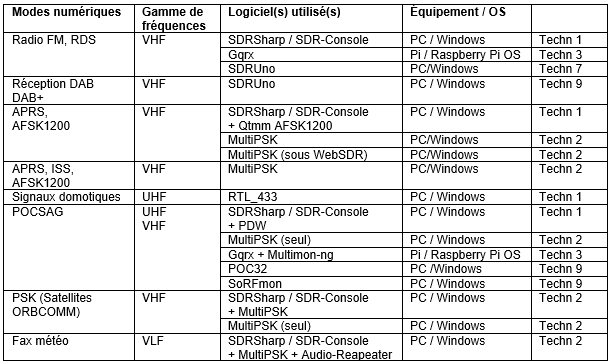
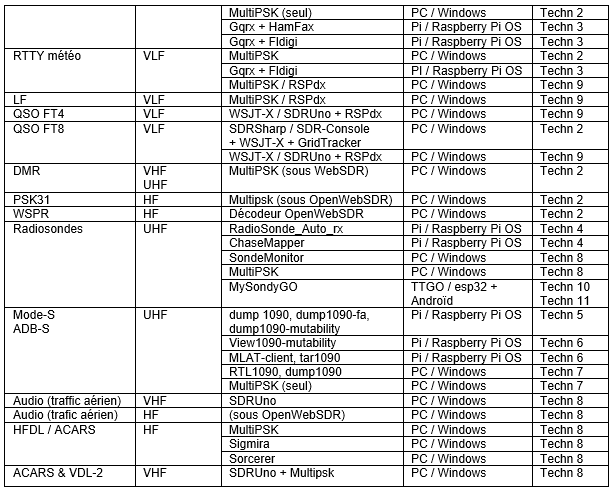
Voici tout d’abord, et mis à jour, le tableau récapitulatif résumant l’ensemble des décodages qui ont été traités dans cette série de onze articles.
Radiosonde et TTGO – MySondy GO
Avec le dixième article, nous découvrions les cartes TTGO de Lilygo nommées LoRa32 qui allaient nous permettre de revenir sur l’un des sujets phare de nos articles : la chasse aux radiosondes. Notre objectif, avec ce petit boitier était de partir à leurs recherches près de leurs points de chute après avoir obtenu une position GPS approximative (voir Technique SDR 4).
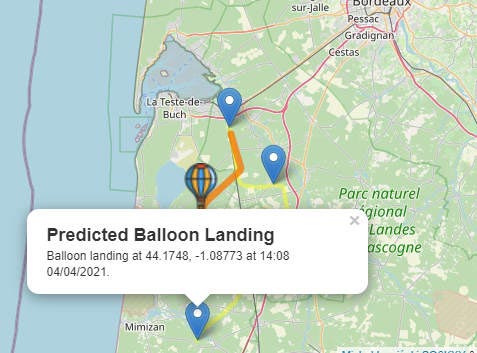
Exemple de donnée RadioSondy
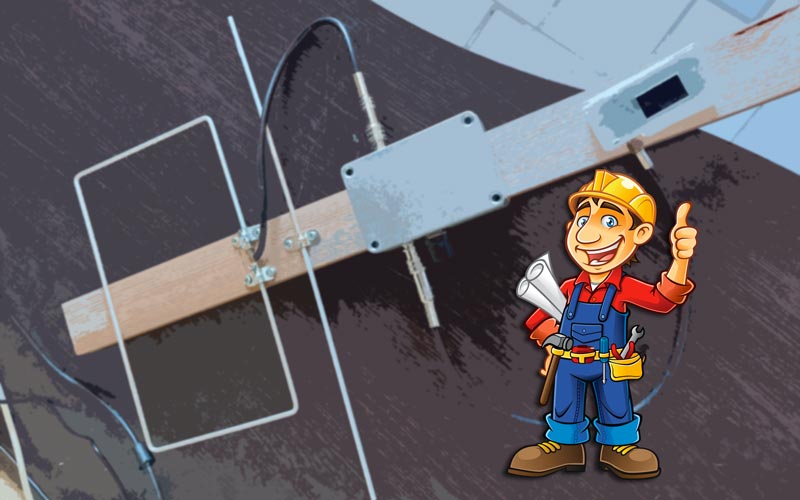
L’antenne (reprise de la fin de notre précédent article)
Selon des informations de la doc Internet, la mini-antenne vendue avec la carte TTGO est accordée sur 433 MHz. En fait, des mesures ont montré qu’elle l’était sur 475 MHz (on ne peut pas faire confiance aux chinois 😊).
Curieux, je l’ai « démonté. » Il s’agissait d’un fil de cuivre en forme de tirebouchon. J’ai compté 19 tours d’un fil émaillé ayant été, à l’origine, enroulé sur un support de 3,5 mm de diamètre. Le fil semble avoir un diamètre de 0,5 mm ou moins.
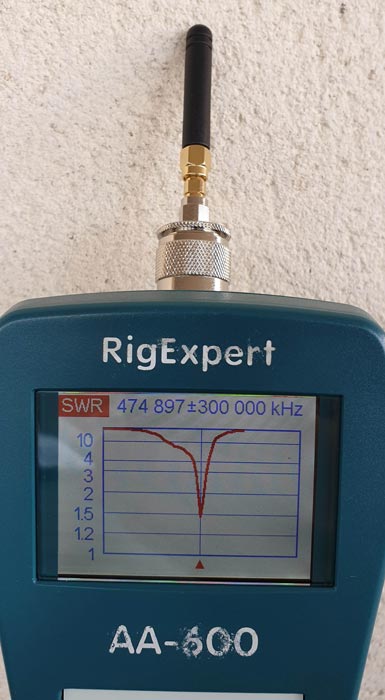
L’antenne est accordée sur 475 MHz

L’antenne vendue avec la carte TTGO
Dans notre cas, il faut une antenne accordée sur 402 MHz. Avec celle-ci, il ne s’agira pas de faire de la réception sur des objets éloignés, mais sur des boitiers radiosondes situés entre quelques centaines de mètres et 1 km du point d’écoute.
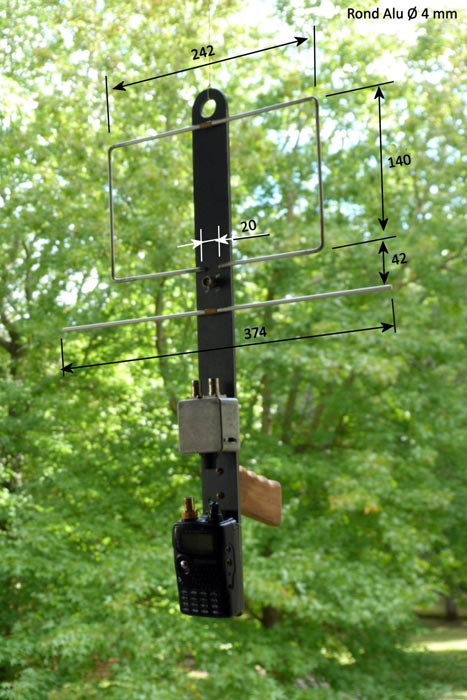
Très vite, j’oriente mon choix vers l’antenne CJU 403 MHz par F0ERP, F6IPO, F4GRT et F4FKB décrite sur le site radiosonde.eu associé à l’atténuateur à décalage décrit dans ce même article par Michel, F6IPO.
De A à Z, l’antenne CJU 403 MHz et ses accessoires
Ayant contacté Michel, il me transmet un dossier complet sur son propre montage. Je me décide à fabriquer une antenne selon ses cotes.

L’ensemble antenne/récepteur de Michel, F6IPO (source radiosonde.eu)
Sur la même page radiosonde.eu, un autre radioamateur indique avoir réalisé un modèle légèrement différent après une simulation avec le logiciel Eznec (dorénavant gratuit). Si un lecteur se sentait le courage d’écrire un petit tutoriel à ce sujet, je serais intéressé à le rajouter à cet article.
J’achète le rond d’aluminium, diamètre 4 mm sur Internet, chez Bricoman
Site de vente Bricoman
Reçu, par transporteur, quatre jours plus tard, le port m’a couté 5 €.
L’antenne CJU de Michel, F6IPO avec son atténuateur à décalage
Pour le pliage, un simple étau fait l’affaire.


Pliage 1/2


Pliage 2/2
Attention, si l’on souhaite avoir un espacement de 20 mm entre les deux dominos soudés (voir ci-dessous), il faut que cet espacement soit de 34 mm à la fabrication du trombone.

Colliers de plomberie
Une fois plié, je soude aux deux extrémités du trombone la borne métallique d’un domino électrique que j’ai préalablement extrait de son enveloppe plastique. La soudure se fait après extraction d’une des deux vis de la borne.
Pour la fixation, sur un liteau de bois de longueur 80 cm (largeur 4,7 cm, épaisseur 1,8 cm), j’utilise des colliers de plomberie fixée à l’aide de vis à tête cylindrique 3,5 x 16 mm.


Dominos électriques
Suivant les conseils des uns et des autres, je décide d’associer cette antenne à un atténuateur réglable et à décalage. Michel, F6IPO, m’explique en effet qu’un simple atténuateur résistif n’est pas la meilleure solution pour la recherche des radiosondes en environnement proche. En effet, les récepteurs utilisés ne sont généralement pas suffisamment blindés, voire pas du tout. L’atténuateur passif réduira la tension présente à la prise d’antenne, mais les signaux RF étant reçus directement, ils satureront les circuits d’entrée non blindés, rendant l’atténuateur inefficace.
Par contre, la technique du décalage de la fréquence du récepteur permettra de s’affranchir de cet impact direct sur les circuits d’entrée.
L’atténuateur à décalage utilisé par Michel, se compose d’un oscillateur local de 4 MHz, d’un mélangeur à diode et d’un potentiomètre de réglage du niveau d’atténuation.
Si, par exemple, la balise de notre ballon-sonde émet sur 405 MHz, il suffira de régler le récepteur sur l’une des deux fréquences produites par le mélange (405 plus ou moins 4 MHz, soit 401 ou 409 MHz pour notre exemple). Un potentiomètre logarithmique contrôle permet de régler le niveau de l’oscillateur local injecté dans le mélangeur. L’atténuation maximum obtenue est théoriquement largement supérieure à 100 dB.
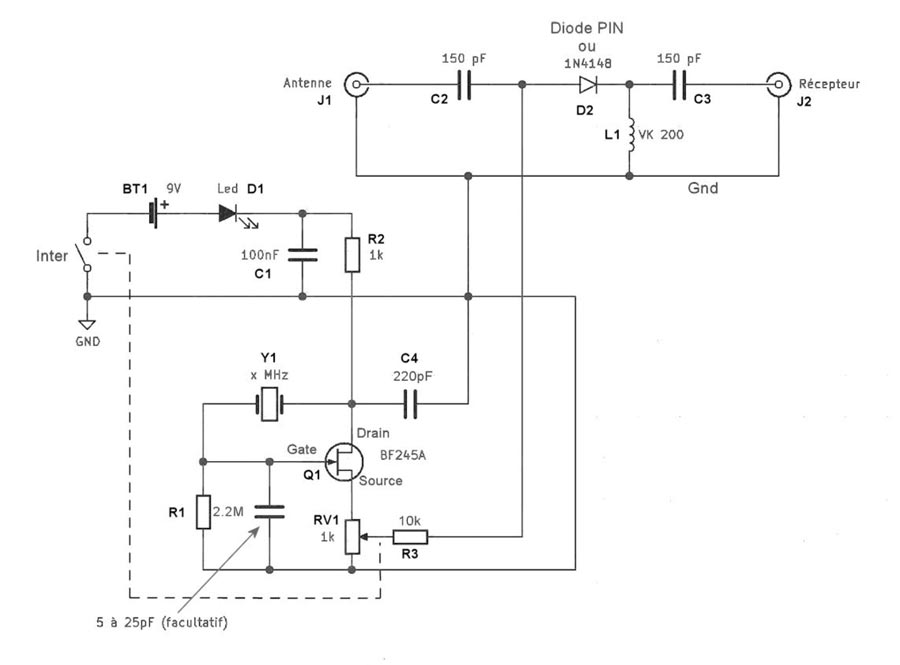
Schéma de l’atténuateur à décalage utilisé par Michel, F6IPO. Merci à lui, pour m’avoir autorisé à le publier. Il m’a néanmoins précisé qu’il n’en est pas l’auteur mais qu’il a dû « le glaner un jour lointain sur Internet. » Si l’auteur de ce schéma se reconnait, je m’empresserai de modifier cet article afin de lui en attribuer la paternité.
J’ai eu, pour ma part, la chance de recevoir le circuit imprimé correspondant sans avoir à le faire réaliser. Il mesure 40.5 x 20.2 mm.
Les lecteurs qui souhaiteraient le faire réaliser, tout en évitant une commande en Chine peuvent s’adresser à la société JLCPCB. Voir pour cela : https://www.framboise314.fr/jlcpcb-fabrique-les-circuits-que-vous-imaginez/
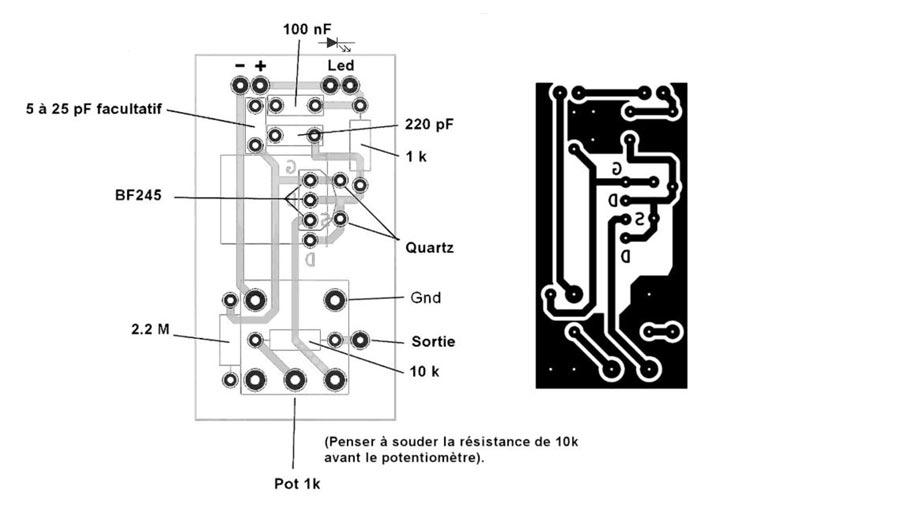
Circuit imprimé pour l’atténuateur à décalage utilisé par Michel, F6IPO. Merci à lui, pour m’avoir autorisé à le publier
L’achat des composants a été réalisé auprès de la société E44 (www.e44.com). Les références et désignations des composants nécessaires sont listées ci-dessous.
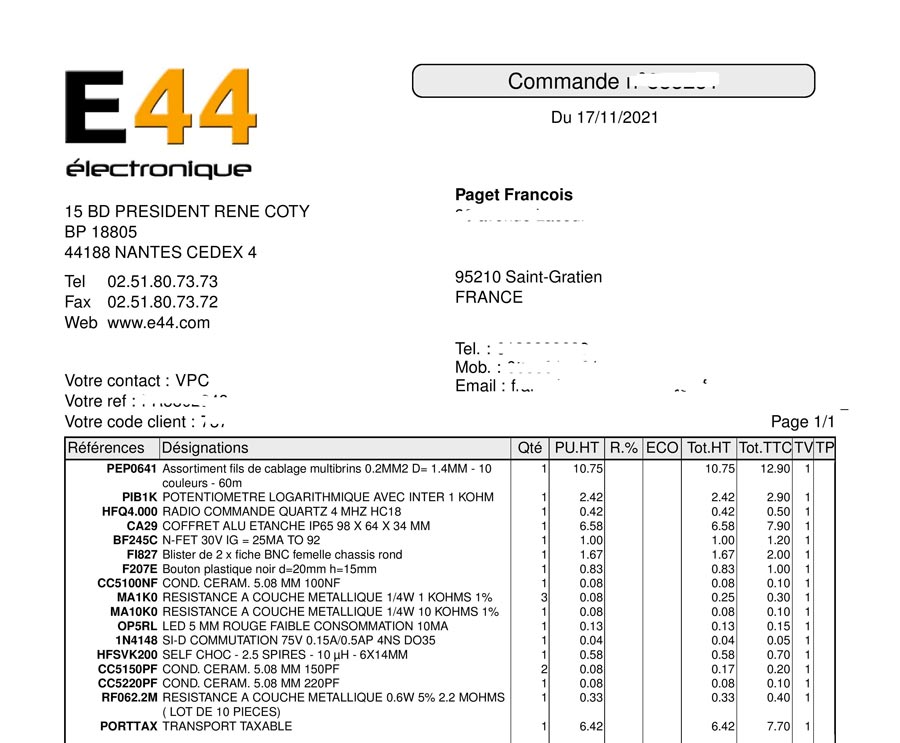
Composants pour l’atténuateur à décalage utilisé par Michel, F6IPO.
Après réception du matériel, il ne reste plus qu’à monter l’ensemble.
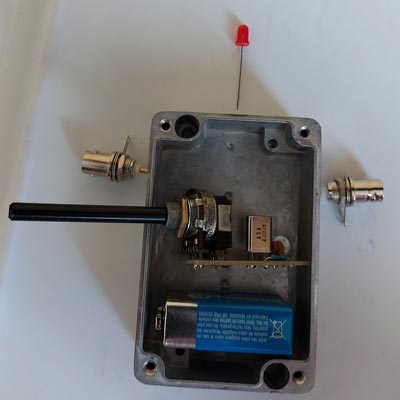
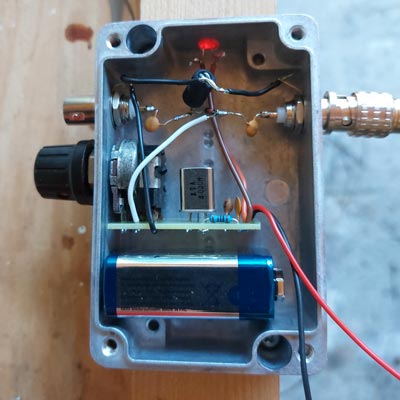
Le boitier atténuateur et ses composants
Voici, pour information, mes diamètres de perçage :
- Potentiomètre : 10 mm
- Fiches BNC : 9,1 mm
- LED : 5 mm
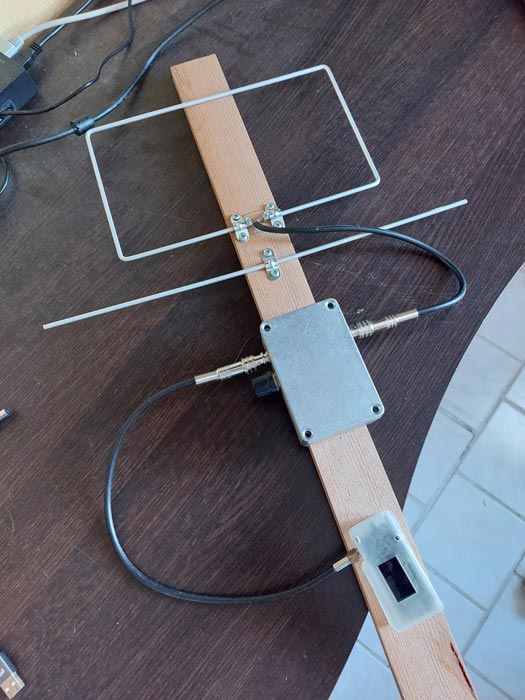
L’ensemble antenne/atténuateur/TTGO
Bonne chasse à vous !
Et voilà cette série d’articles terminée. J’espère qu’elle vous aura donné envie de découvrir, à votre tour, quelques aspects de la radio logicielle. Pour ma part, je dois aujourd’hui laisser mes récepteurs et ma nouvelle antenne pour rejoindre la région Est ou m’attend un nouveau petit-fils… Je compte bien cependant revenir vers vous, dans quelques mois, avec un petit supplément ayant pour titre « Quoi de neuf dans le monde SDR ».
Vignette : https://www.piqsels.com
 par François F-80543 | F-80543
par François F-80543 | F-80543